

Research Progress
New Progress in LLM + Robot Planning Significantly Boosts Execution Reliability in Intelligent Manufacturing
In the field of intelligent manufacturing, robot task deployment based on symbolic planning has long been constrained by fragile and error-prone domain models.The research team from the Industrial Control Network and System Department at the Shenyang Institute of Automation (SIA) of the Chinese Academy of Sciences, has proposed a trajectory-guided domain repair framework that achieves precise alignment between symbolic planning models and real-world physical scenarios.
The results were recently published online in the international journal Robotics and Computer-Integrated Manufacturing, under the title Bridging the Semantic Gap: Trajectory-Guided Domain Repair for Reliable Planning. Ph.D. student LIU Ruikai is the first author, while Researcher ZENG Peng and Associate Researcher WAN Guangxi are the corresponding authors.
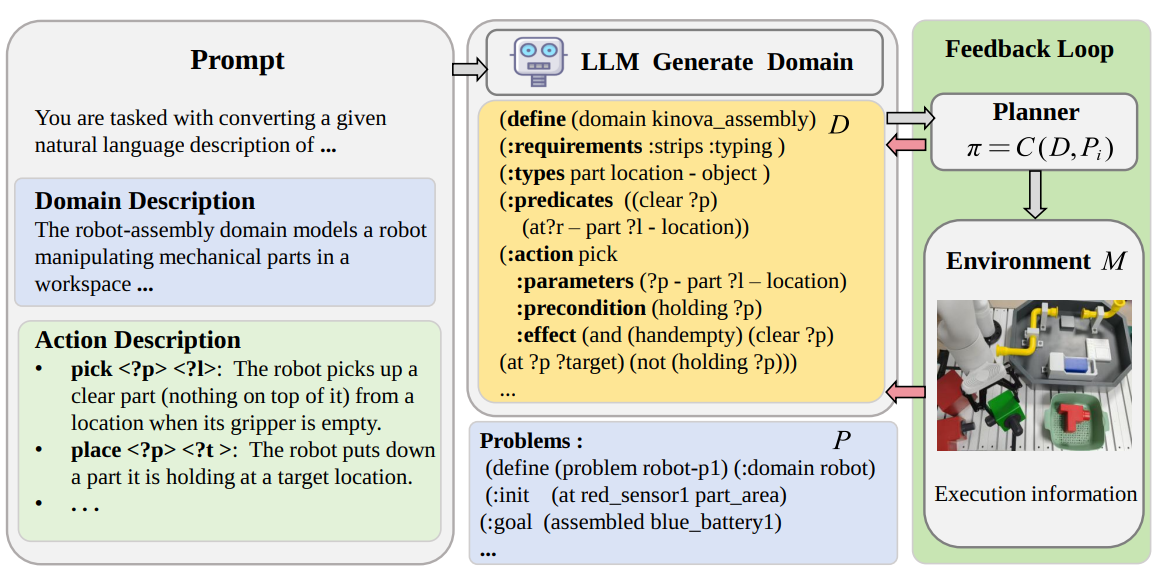
A trajectory-guided domain generation and repair framework for reliable robot planning (Image by SIA)
Although large language models (LLMs) can rapidly generate Planning Domain Definition Language (PDDL), they often contain subtle defects such as insufficient preconditions and missing action effects, which seriously hinder the stability of robot automation.
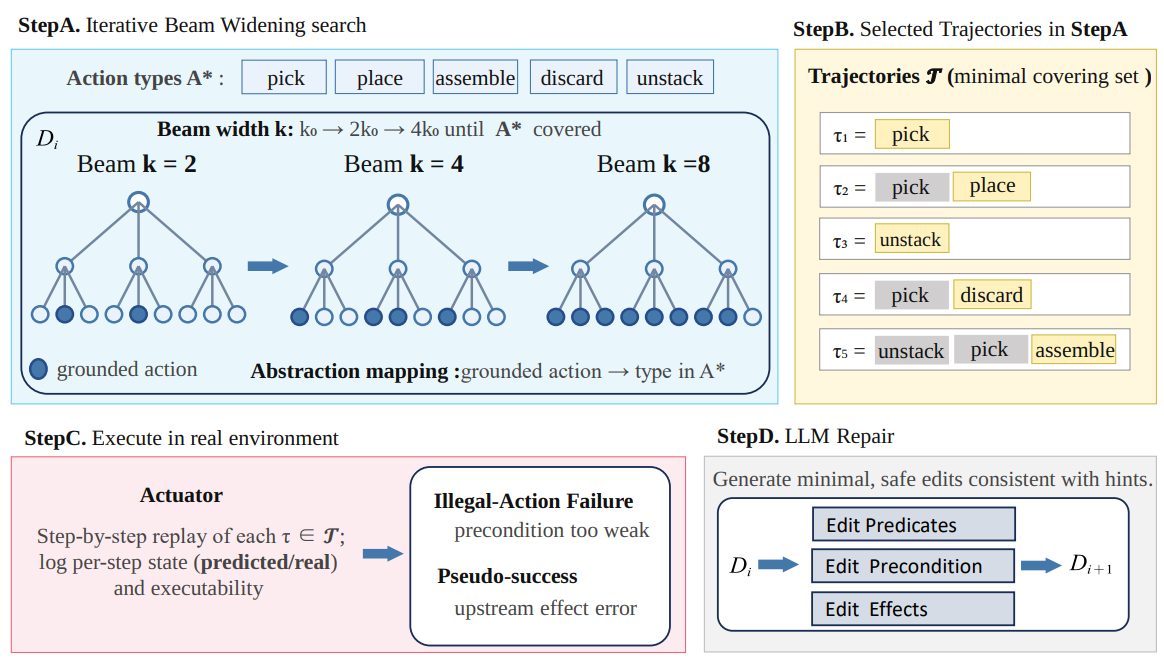
The novel method proposed by the research team adopts two-stage closed-loop optimization. First, it selects high-value simplified trajectories through iterative beam search, minimizing the interaction cost between the robot and the environment. Second, it accurately attributes execution failures by distinguishing precondition deficiencies from the influence of upstream actions, and then generates structured prompts to guide the LLM in completing automatic model repair.
The method was validated on 12 benchmark tests covering both industrial simulation and physical robot scenarios, achieving an execution success rate of 71.2%. Under the same standards, it outperforms all compared methods, reaching the current state-of-the-art. Meanwhile, the solution dramatically reduces interaction cost, requiring an average of only 231 environment interactions per task—nearly an order of magnitude less than traditional exploratory methods—thereby significantly enhancing its practicability.
This research provides a viable pathway for connecting high-level symbolic reasoning with low-level physical execution. It can effectively improve the reliability of LLM-driven automation systems in complex manufacturing scenarios, offering key technical support for the deployment of intelligent robots, flexible production lines, and high-end smart manufacturing.
