

Research Progress
SIA Has Series of Research Papers Accepted by ICML 2026
Recently, the Machine Intelligence Research Group at the Robotics Laboratory, Shenyang Institute of Automation (SIA) of the Chinese Academy of Sciences, has made important progress in robot imitation learning and polarization vision. A series of related research outcomes have been formally accepted by ICML 2026, a leading international conference in artificial intelligence.
Paper title: FocalPolicy: Frequency-Optimized Chunking and Locally Anchored Flow Matching for Coherent Visuomotor Policy
First author: Ph.D. students HE Qian and YANG Zhenshuo
Corresponding author: Researcher TIAN Jiandong.
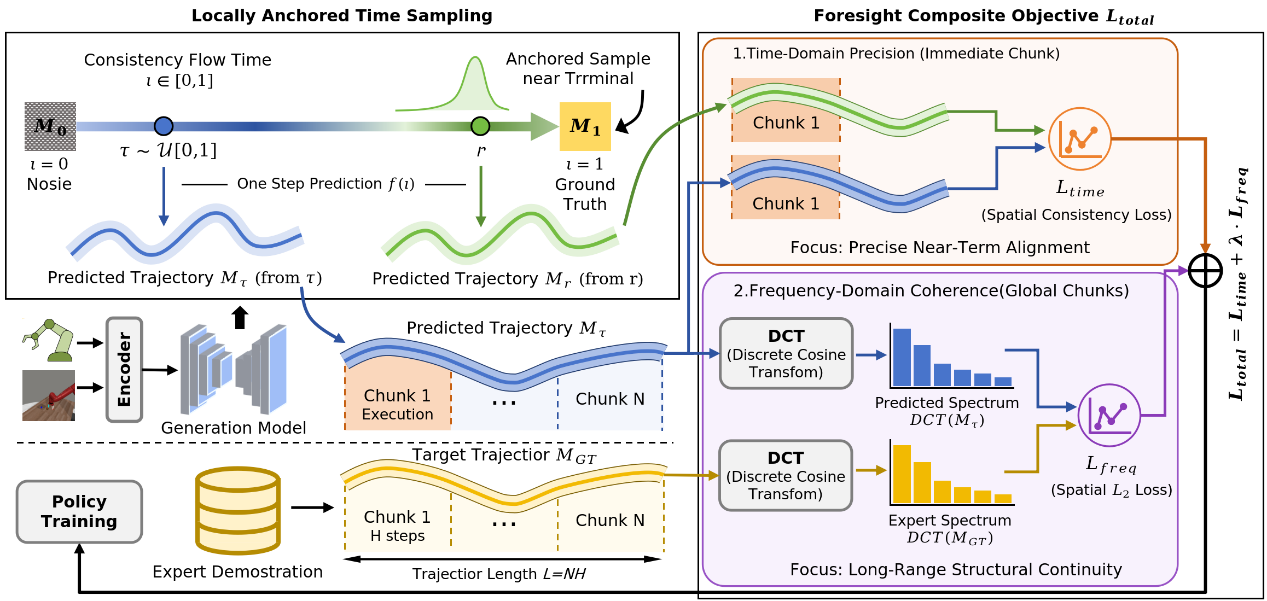
Schematic of the FocalPolicy forward-looking visuomotor policy framework (Image by SIA)
Aiming at the problems of discontinuity between action chunks, error accumulation, and incoherent trajectories in long-horizon action generation for robot imitation learning, the research team proposed FocalPolicy, a visuomotor policy framework with forward-looking perception. The method combines fine temporal alignment of proximal actions with frequency-domain structural constraints across distal action chunks, thereby ensuring current manipulation precision while enhancing the global coherence of long-horizon trajectories. Meanwhile, a locally anchored sampling mechanism was designed to improve the propagation efficiency of target signals during consistency flow matching training.
Paper title: DuRP: Dual-Stage Physics-Embedded Learning for Joint Radiance and Polarization Restoration
First author: Ph.D. student YANG Zhenshuo
Corresponding author: Researcher TIAN Jiandong.
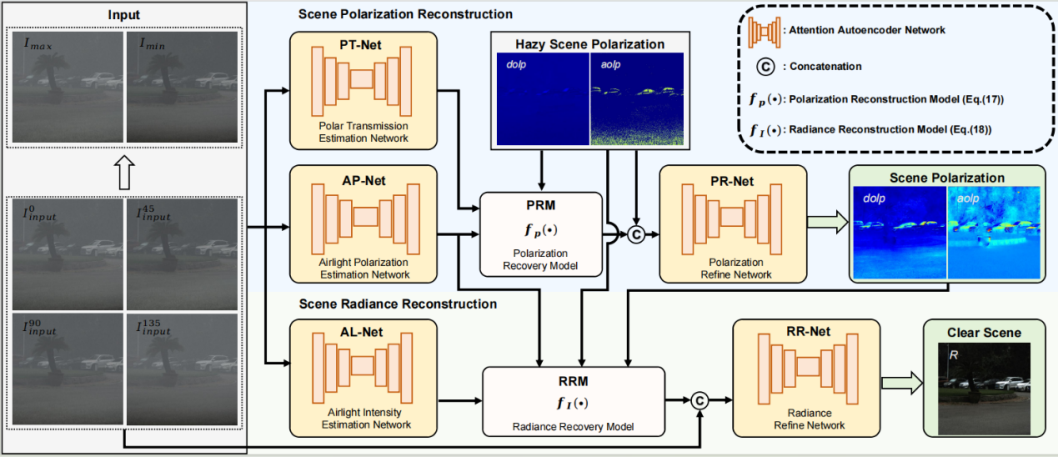
Schematic of the DuRP dual-stage physics-embedded polarization vision restoration framework (Image by SIA)
To overcome the challenge that in scattering environments such as haze, polarization imaging simultaneously suffers from degradation of scene radiance and polarization information, and existing dehazing methods struggle to recover the true polarization state, the research team proposed a dual-stage physics-embedded learning framework, DuRP. This framework breaks away from the overly idealized angular assumptions in traditional polarization scattering models, constructs a more generalizable polarization physical model, and embeds it as a differentiable operator into a neural network to sequentially accomplish scene polarization reconstruction and radiance reconstruction.
The International Conference on Machine Learning (ICML) is widely recognized as a premier international conference in the field of artificial intelligence and machine learning, and is a Class A conference in the AI domain recommended by the China Computer Federation (CCF).
The Machine Intelligence Research Group has long been dedicated to cutting-edge directions such as embodied intelligence and computer vision, and has consistently produced original achievements in areas including 3D object detection, cross-modal transfer learning, multi-agent cooperative tracking, polarization image processing, embodied navigation, and robot manipulation. Their papers have been successively published in a series of top-tier international conferences in artificial intelligence and computer vision, including AAAI 2026, ICML 2026, CVPR 2026, and ICLR 2026.
