

Research Progress
SIA Has Series of Research Papers on Embodied AI Navigation and Low-Rank Tensor Recovery Theory Accepted by Top International Conference ICLR 2026
Recently, a series of research achievements on embodied intelligent navigation and low-tubal-rank tensor recovery theory by the Machine Intelligence Research Group of the Robotics Research Laboratory at the Shenyang Institute of Automation (SIA), Chinese Academy of Sciences (CAS), has been formally accepted by the International Conference on Learning Representations (ICLR) 2026, a leading international academic conference in the field of artificial intelligence.
Paper Title: All-day Multi-scenes Lifelong Vision-and-Language Navigation with Tucker Adaptation
First Authors: Ph.D. student WANG Xudong and intern LI Gan
Corresponding Author: Researcher HAN Zhi
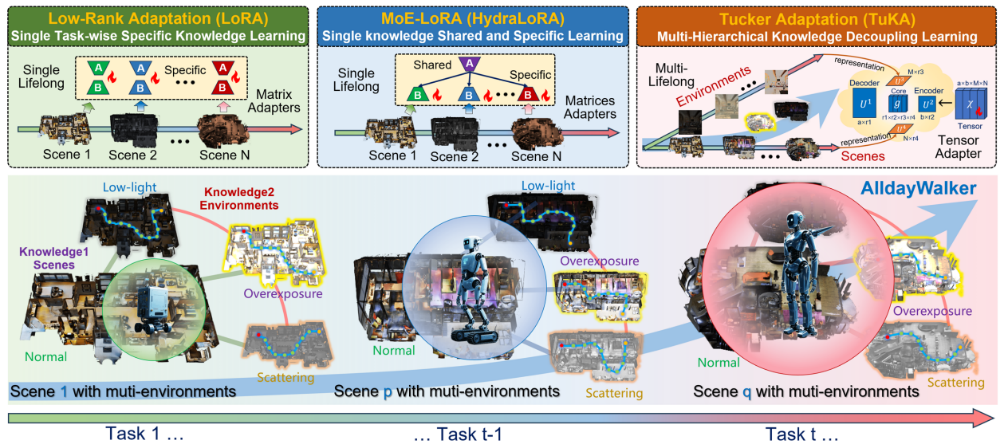
All-Weather, Multi-Scenario Lifelong Vision-and-Language Navigation Framework (Image by the research group)
To address the challenges of "catastrophic forgetting" and capturing multi-level knowledge when vision-and-language navigation agents are deployed across different scenarios and environments, the research team proposed TuKA, a high-order tensor adaptation framework based on Tucker decomposition. This framework models navigation knowledge as a high-order tensor and decouples it into shared subspaces and task-specific expert matrices. Coupled with a "decoupled knowledge incremental learning strategy," it enables the agent to effectively consolidate prior knowledge while learning new skills. The robot "Allday Walker," developed based on this framework, demonstrated outstanding performance across tests in 24 complex working conditions, achieving all-weather continuous evolution.
Paper Title: Lifelong Embodied Navigation Learning
First Authors: Ph.D. student WANG Xudong and Dr. DONG Jiahua
Corresponding Authors: Assistant Researcher LIU Baichen and Researcher HAN Zhi
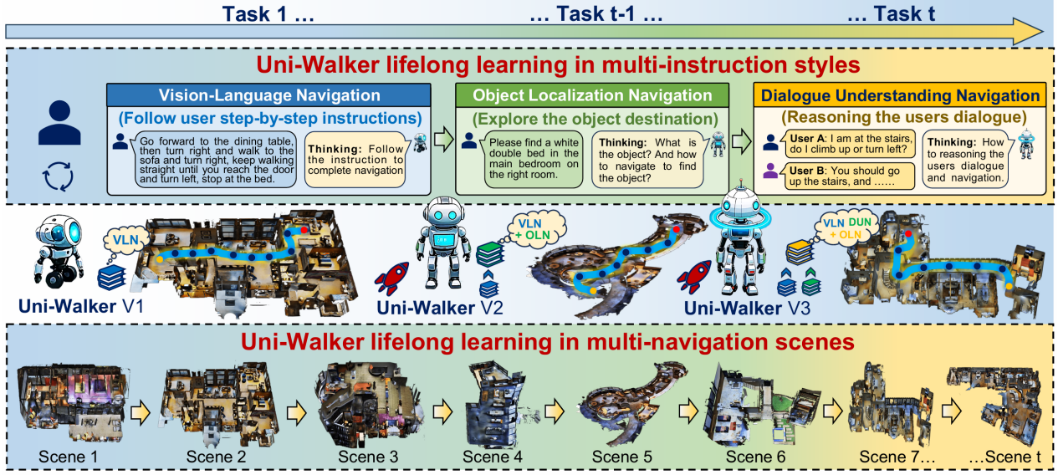
Human-Inspired Lifelong Learning Framework (Image by the research group)
To tackle the issue where embodied navigation agents tend to forget knowledge from previous tasks when continuously learning new tasks involving multiple scenarios and diverse instruction styles, the research team proposed Uni-Walker, a lifelong embodied navigation framework. This method innovatively expands the decoder's Low-Rank Adaptation (LoRA) architecture to explicitly decouple navigation knowledge into task-shared and task-specific components. It employs a knowledge inheritance strategy and an expert co-activation strategy to facilitate efficient transfer and refinement of shared knowledge. Furthermore, it combines expert subspace orthogonal constraints with a navigation-specific chain-of-thought mechanism to precisely capture the reasoning patterns associated with specific instruction styles.
Paper Title: The power of small initialization in noisy low-tubal-rank tensor recovery
First Author: Ph.D. student LIU Zhiyu
Corresponding Author: Professor WANG Yao
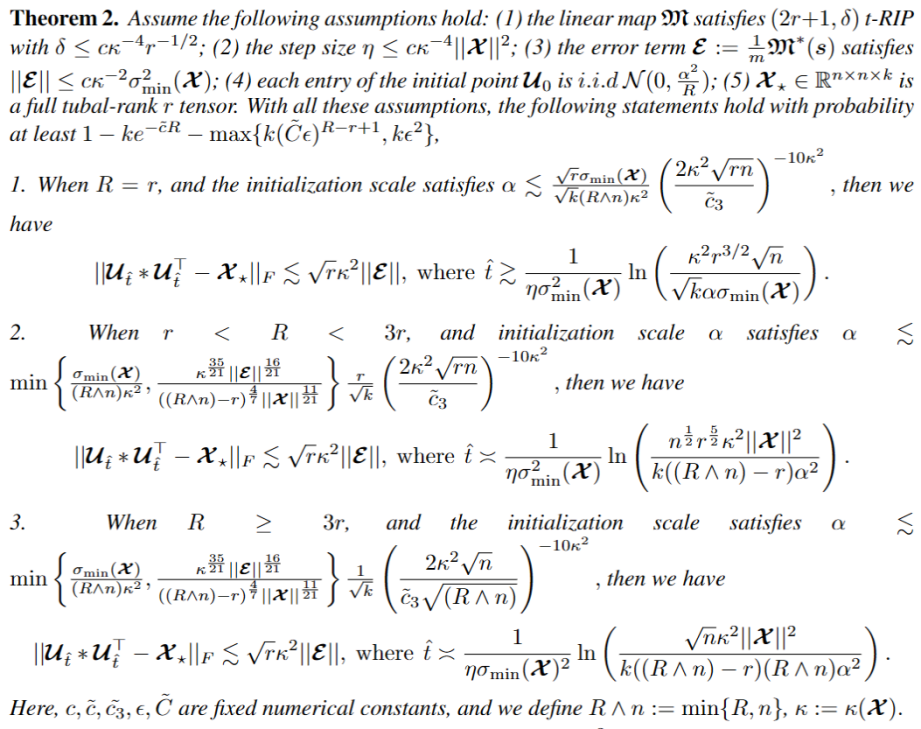
Low-Tubal-Rank Tensor Recovery Theory (Image by the research group)
Facing the challenge that low-tubal-rank tensor recovery struggles to balance computational efficiency with recovery accuracy under noise interference, the research team conducted an in-depth analysis of the theoretical bounds of gradient descent algorithms with small initialization. This study is the first to prove that, in the presence of additive noise, gradient descent with a small initialization strategy can converge at a linear rate to an error close to the information-theoretic optimum. It also reveals the algorithm's implicit regularization properties. Through rigorous mathematical proofs, the study establishes the sample size threshold and initialization scale required to guarantee optimal recovery, providing solid theoretical support for tensor recovery and denoising tasks involving high-dimensional, complex data.
ICLR is a top-tier flagship conference in the global field of artificial intelligence. SIA places high importance on the deep integration of artificial intelligence and robotics technology. The acceptance of multiple papers by ICLR signifies that the institute is making continuous new progress and achieving substantive results in technological innovation for embodied machine learning research.
