Flexible Exoskeleton Robot System (Image by the research group)
Exoskeleton robots hold broad application prospects for lower-limb functional rehabilitation and walking assistance. Research teams worldwide are actively exploring how to provide functional assistance that better aligns with human biomechanics while preserving joint degrees of freedom.
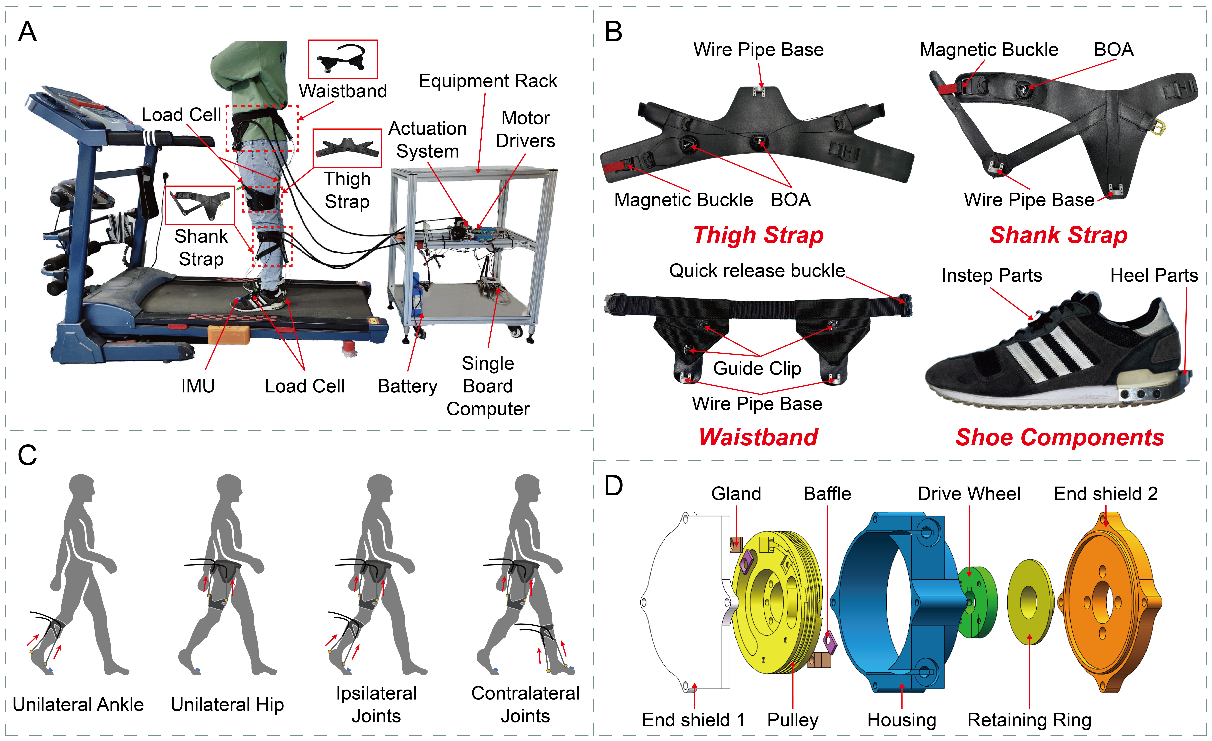
Recently, a research team from the Robotics Laboratory at the Shenyang Institute of Automation (SIA), Chinese Academy of Sciences (CAS), has developed a modular soft lower-limb exoskeleton robot. The wearable part of this exoskeleton is constructed from flexible materials such as leather and fabric. It facilitates easy donning/doffing and adjustment of tightness via quick-fit mechanisms including magnetic buckles and BOA dials. Employing a modular design, the soft exosuit supports four assistive configurations: single-joint (ankle or hip), ipsilateral hip-ankle, and contralateral hip-ankle, enabling targeted assistance based on user needs.
Conventional soft exoskeletons often utilize a single motor to provide assistance in only one direction of movement. In contrast, this novel exoskeleton employs a bidirectional cable-driven actuator to generate assistive forces. A time-sharing strategy is adopted, where the motor's clockwise and counterclockwise rotations drive movements in the two directions of the same joint respectively. This enables bidirectional assistance for flexion/extension (hip) or plantarflexion/dorsiflexion (ankle), ensuring sufficient torque output while reducing hardware complexity.
The team systematically evaluated the performance of this modular soft exoskeleton under different assistive configurations in a lab setting. Ten healthy participants wore portable gas analyzers to measure net metabolic rate and had surface electromyography (EMG) electrodes placed on target muscles to quantify muscle activation levels. Experimental results demonstrated that the soft lower-limb exoskeleton reliably provided effective assistance when aiding the hip and/or ankle joints individually or synergistically. This highlights its advantages in multi-configuration adaptability and modularity, confirming its capability to effectively assist walking under various configurations.
This research, entitled Modular Soft Exoskeleton Design and Control for Assisting Movements in Multiple Lower Limb Joint Configurations, has been published in the esteemed journal IEEE Transactions on Automation Science and Engineering. Dr. BiZhang, an Associate Researcher at SIA, is the first author. Corresponding authors are Associate Researcher XiaoweiTan and Researcher XingangZhao. The work was supported by projects from the National Natural Science Foundation of China (NSFC) and the China Postdoctoral Science Foundation.