Homologous Difference Evaluation Paradigm (Image by the research group)
Lower limb exoskeleton technology can provide assistive training for elderly individuals with mobility challenges and patients with limb disabilities, aiding in the recovery of impaired motor functions. However, current research faces bottlenecks in clinical translation due to the lack of a reliable interaction evaluation benchmark. Existing methods predominantly focus on verifying the effectiveness of assistance strategies while paying insufficient attention to interaction quality. Traditional biomechanical indicators, on the other hand, overlook the bidirectional human-robot interaction and exoskeleton performance degradation. Moreover, they rely on external sensors/instrumentation and structured environments, making it difficult to meet the clinical requirements for real-time, dynamic, and safe clinical assessment.
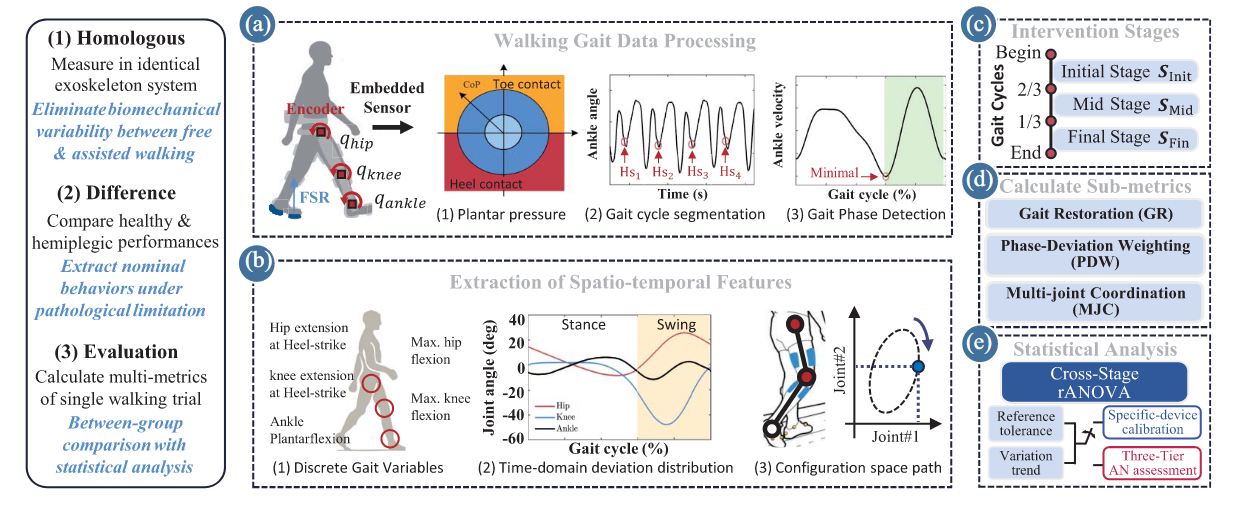
Recently, a research team from the Robotics Laboratory at the Shenyang Institute of Automation (SIA), Chinese Academy of Sciences (CAS), proposed an “assistive normality” evaluation method to systematically characterize the human-robot coupling features of exoskeletons in their nominal state. Addressing the issue that traditional evaluations emphasize “method superiority” but neglect interaction quality, the team expanded the evaluation perspective from a single subject to the entire coupled system for the first time. They constructed a multidimensional, low-cost quantitative indicator framework that includes three subdivided metrics: gait restoration, phase deviation weighting, and multi-joint coordination. This framework can dynamically reflect human-robot interaction performance across different intervention stages within a single rehabilitation session.
Additionally, the research team introduced a homologous difference evaluation paradigm. By using the same exoskeleton system on both healthy individuals and hemiplegic patients—and using the between-group gait differences as a calibration benchmark—they achieved effective calibration of the evaluation metrics. This method provides a standardized, generalizable, and interaction quality-oriented evaluation approach for rehabilitation exoskeletons, contributing to improved training safety, individualized adjustment, and clinical deployment.
The team conducted experimental validation. The results demonstrated that “assistive normality” can capture progressive gait recovery during exoskeleton training and reveal pronounced time-varying HRI characteristics, confirming its effectiveness and sensitivity as an interaction quality evaluation metric. The method exhibits low dependency on specific hardware or assistance strategies, demonstrating strong generalizability and promotion potential. It offers a new methodology for the clinical rehabilitation application and personalized adjustment of exoskeletons.
The study, entitled Manifesting Nominal Assistance in Hemiplegia Gait Training Through an Assistive Normality Framework, was published in the IEEE Transactions on Systems, Man, and Cybernetics: Systems, a leading journal in the field of systems engineering. Dr. Wanxin Chen from SIA was the first author of the paper, with Associate Researcher Bi Zhang and Researcher Xingang Zhao serving as corresponding authors.
The research was supported by projects from the National Natural Science Foundation of China and the Natural Science Foundation of Liaoning Province.
DOI: 10.1016/j.ijmecsci.2025.110542
Paper Link: https://ieeexplore.ieee.org/document/11130676