Researchers from the Shenyang Institute of Automation (SIA), Chinese Academy of Sciences (CAS), have developed a novel bilateral hip-knee-ankle rehabilitation exoskeleton with fully compliant actuators for hemiplegic lower limb rehabilitation. Complementing the hardware, they introduced an "assist-as-needed" multi-level control framework to enhance rehabilitation outcomes. This breakthrough, titled "Hip–Knee–Ankle Rehabilitation Exoskeleton with Compliant Actuators: From Human–Robot Interaction Control to Clinical Evaluation," was published in IEEE Transactions on Robotics (T-RO).
Lower limb rehabilitation exoskeletons aim to restore neurological function through neuroplasticity-based training. However, hemiplegic patients exhibit heterogeneous ambulation: the affected side shows reduced function and abnormal gait, while the unaffected side remains near-normal. Most previous studies using rigid actuators and single-mode controls have failed to assist the impaired side without compromising compliant interaction on the unaffected side, thereby degrading bilateral rehabilitation effectiveness. To address this, the research team introduced a rigid–flexible coupled exoskeleton with an 'assist-as-needed' multi-level interactive control method, achieving a breakthrough in multidimensional human–robot adaptation and integrated control.
Firstly, in lower limb rehabilitation exoskeleton research, the team has unveiled a compliant sagittal-plane exoskeleton for the hip, knee, and ankle that features a rigid–flexible coupled actuation joint. The system employs an elastic element with multimodal stiffness properties to biomimetically replicate the short-range stiffness of human joints, marking a breakthrough in key rehabilitation exoskeleton components. It further introduces a lightweight, systematic solution for multidimensional human–robot adaptation, enabling a seamless and compliant interaction at the hardware layer.
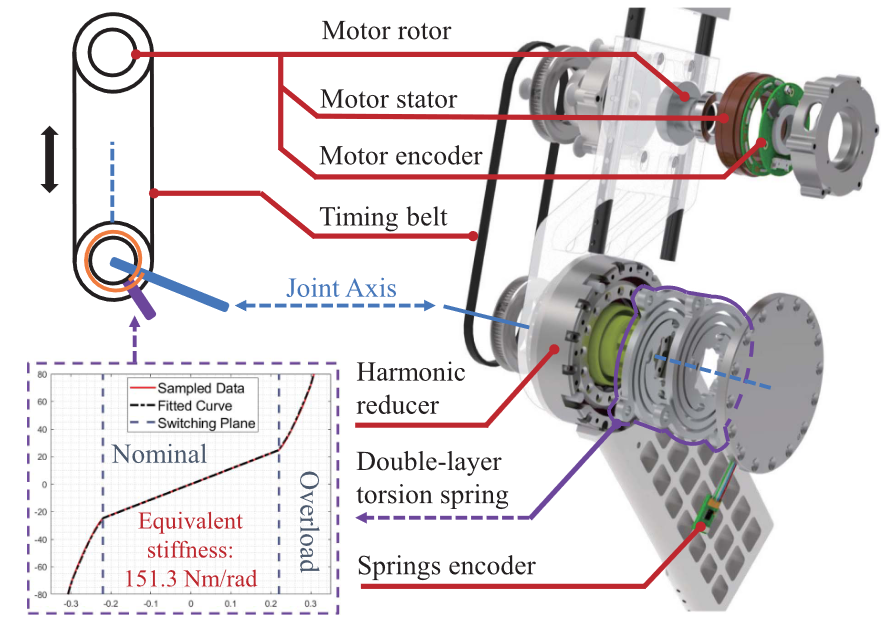
Rigid-Flexible Coupled Compliance Actuated Joint .(Image by the research group)
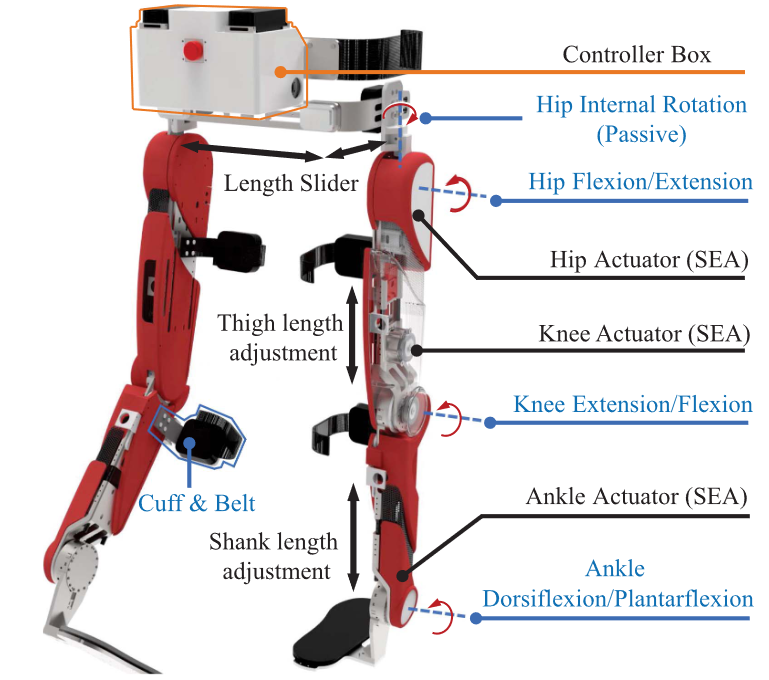
Bilateral Hip-Knee-Ankle Compliant Rehabilitation Exoskeleton .(Image by the research group)
Secondly, in terms of the multilevel interactive control framework, the research team focusing on the heterogeneous ambulation and rehabilitation demands of hemiplegia patients, they presented a multi-level “planning–coordination–control” framework. It breaks free from the limitations of traditional control methods that oscillate between "fully guided" and "fully compliant." By integrating multiple gait templates with real-time feedback, the approach facilitates biomechanical characteristics reconstruction and adaptive planning under coupled assistance. Moreover, the framework incorporates impedance rendering control at the joint level, enabling stable closed-loop interaction across a broad range of impedance in both rigid and compliant subsystems.
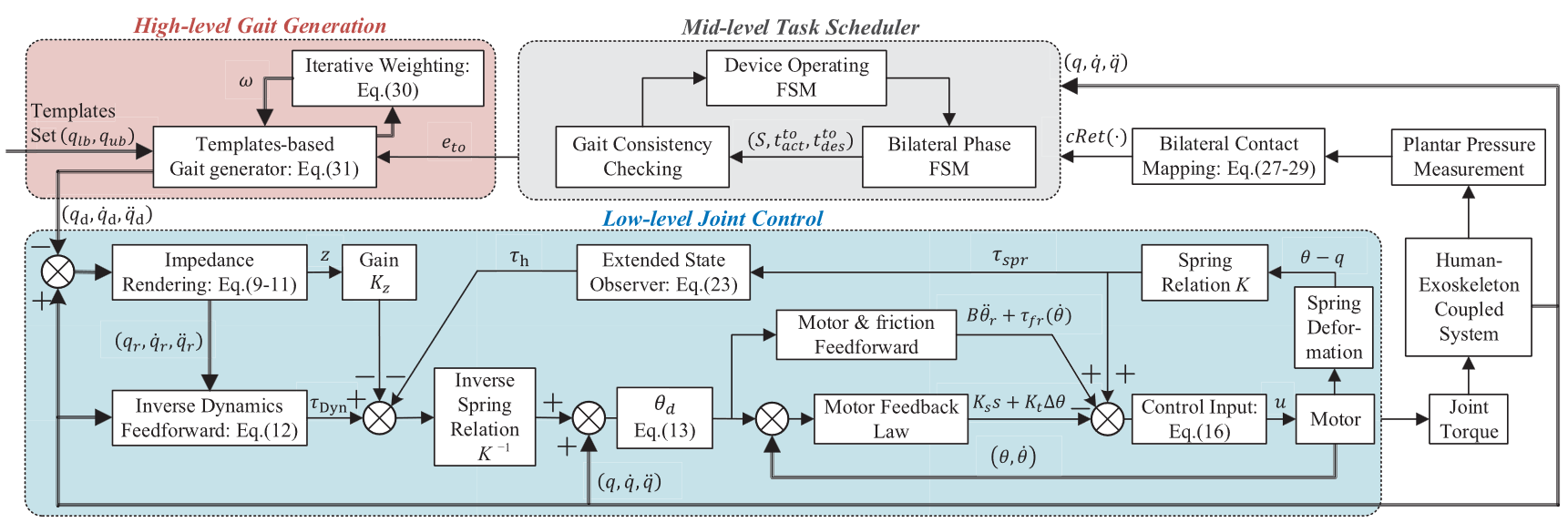
Multi-Level Assist-As-Needed Interactive Control Framework (Image by the research group)
Preliminary clinical validations were conducted in collaboration with Liaoning Provincial People’s Hospital for long-term experiments, demonstrated significant improvements in kinematic restoration, gait naturalness, and bilateral ambulation symmetry. This demonstrates the potential of this study for clinical rehabilitation applications in hemiplegia.
The research team has extensive experience in exoskeleton robotics and intelligent human-robot interaction, has previously developed various rehabilitation robotic platforms for the elderly and patients. Their findings have been published in renowned international journals such as IEEE Transactions on Robotics (T-RO), IEEE Transactions on Neural Systems and Rehabilitation Engineering (T-NSRE), and The Innovation. This work was supported by projects from the National Natural Science Foundation of China (NSFC) and the National Key R&D Program of China.