Relevant studies have shown that the efficient swimming behavior of fish is closely related to their highly sensitive lateral line sensing system and the highly developed, controllable muscle actuation system.
Inspired by this observation, researchers from the Micro and Nano Robotics Research Group at the Chinese Academy of Sciences (CAS) Shenyang Institute of Automation (SIA) have proposed a design method for a multi-mode swimming soft robotic fish. Compared with soft underwater robots of the same kind, this system can achieve integrated actuation-perception-control, demonstrate multiple swimming modes (four types) and show advanced sensing capabilities.
The study was published on 21 January inIEEE Transactions on Robotics (T-RO).
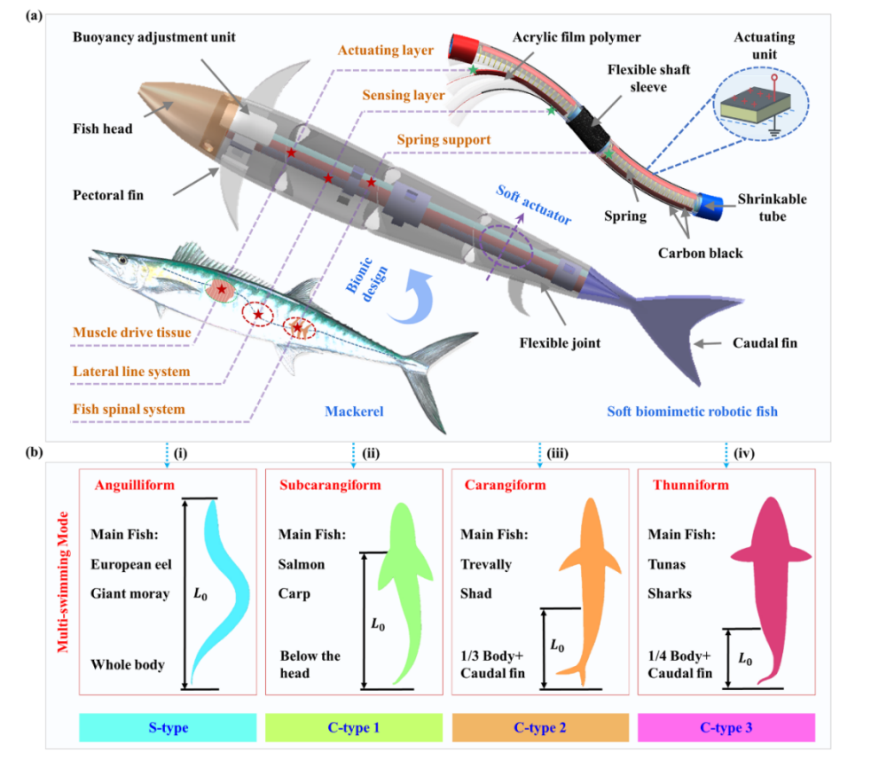
Bionic mechanisms of the soft robotic fish (Image by the research group)
This study achieved groundbreaking progress in three key dimensions: cooperative control strategies for multi-actuation units, implementation of embedded flexible sensing systems, and intelligent environment-adaptive mode switching.
The research team used the mackerel as a biological model for bio-inspired engineering. Through 3D printing technology, the researchers created a flexible bionic structure combined with a soft actuator. The actuator's design integrates three specialized components arranged in functional layers: compression springs, dielectric elastomer (DE) membranes, and flexible electrodes.
To mimic the fish's lateral line sensory system and achieve both movement control and sensing functions, the researchers developed high - precision flexible strain transducers. It can help the robotic fish to sense the swimming state and changes in the surrounding fluid environment in real time, and adaptively switch to the optimal swimming mode.
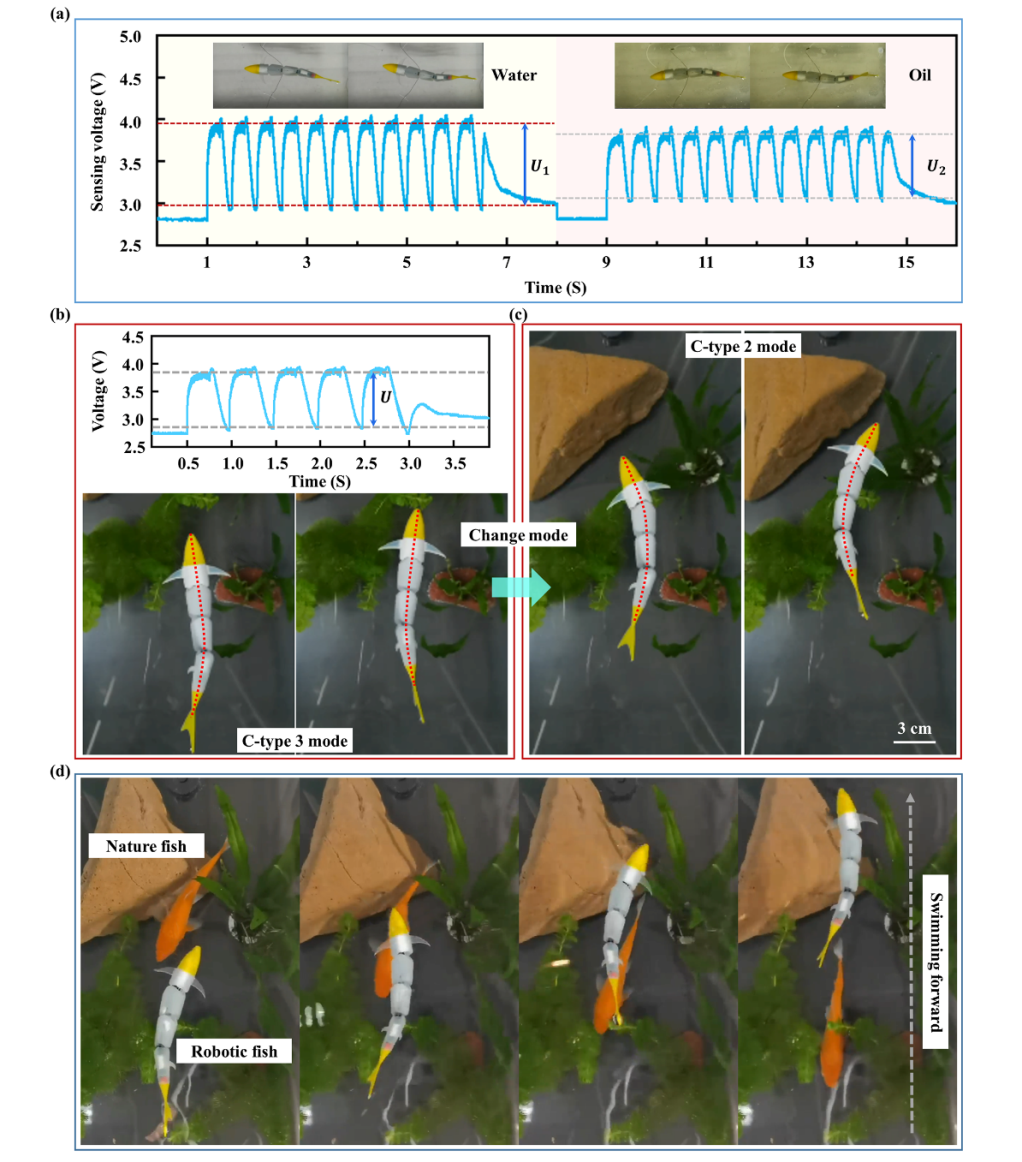
Swimming characteristics of the robotic fish in different environments (Image by the research group)
Furthermore, by synergistically controlling the excitation amplitude and sequence of multiple bionic muscle units, they allowed the robotic fish to successfully reproduce the multiple swimming modes of natural fish and to adapt to different swimming environments.
The research team has long been committed to biomimetic and life like robots researches, actively promoting the integration of robotics technology and life sciences. Their study were supported by the National Key R&D Program, the National Natural Science Foundation, the CAS Project for Young Scientists in Basic Research, the Chinese Academy of Sciences Youth Innovation Promotion Association, and the State Key Laboratory of Robotics Projects.