The challenge of continuum surgical robot operating in human body cavity
Active collision avoidance of continuum robots
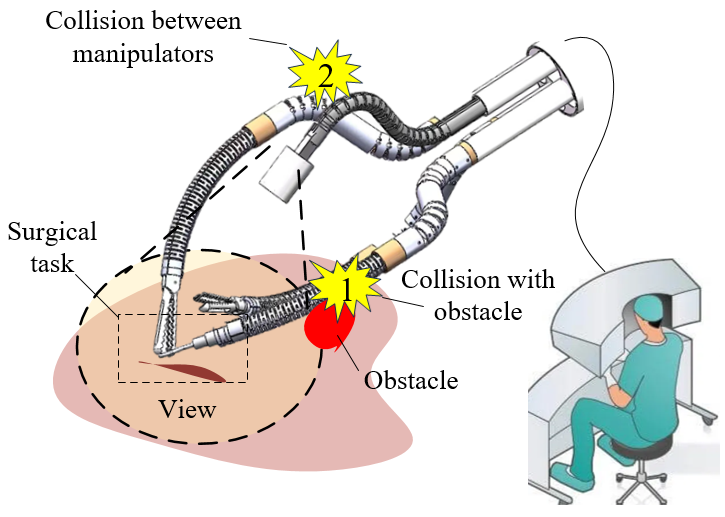
Continuum robot possesses active collision avoidance capability. When operating within the intricate environment of the human body's cavities, such medical robot can effectively prevent collisions between the robot itself and human tissues, or multiple robots. However, researchers still face the challenges caused by irregularity of the flexible structure of continuum robot and the complex nature of obstructive environments, in order to enhance robot’s active collision avoidance capability.
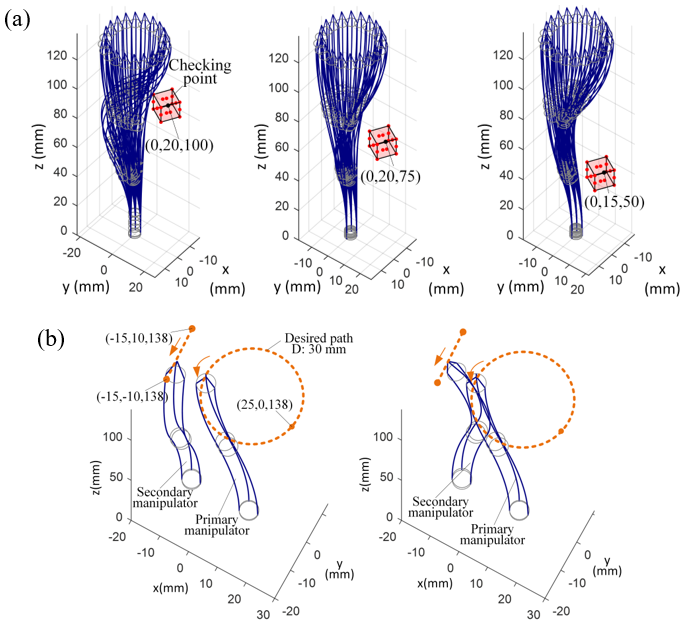
To overcome the aforementioned challenges, the research team has proposed a comprehensive active collision avoidance control framework. This framework comprises a concise expression of the geometric model for continuum robots, a collision detection method between robots and obstacles of arbitrary shapes, adaptable collision avoidance controllers for various tasks, and criteria for evaluating the robot's collision avoidance capability.
This framework offers an effective and feasible approach for safe operations involving continuum robots, thereby propelling the development of intelligent robot-assisted surgeries. The research received support from National Natural Science Foundation of China, National Key R&D Program, Science and Technology Program of Liaoning Province of China, and CAS Interdisciplinary Project.
The research team led by LIU Hao has been focusing on the key technologies and systems development of flexible surgical robots for human body cavities like the gastrointestinal tract, bronchi, and blood vessels for a long time. They have undertaken projects like National Key R&D programs and National Natural Science Foundation of China, and have achieved breakthroughs in the innovation of surgical robot configurations, perception, navigation, and intelligence. Several outcomes, including the endoscopic robot, have advanced to the clinical stage. In recent years, multiple research achievements have been published in prestigious international academic journals such as IEEE T-IE, IEEE/ASME T-MECH, IEEE TIM, IEEE Sens J, IEEE RAL, ERJ and so on.