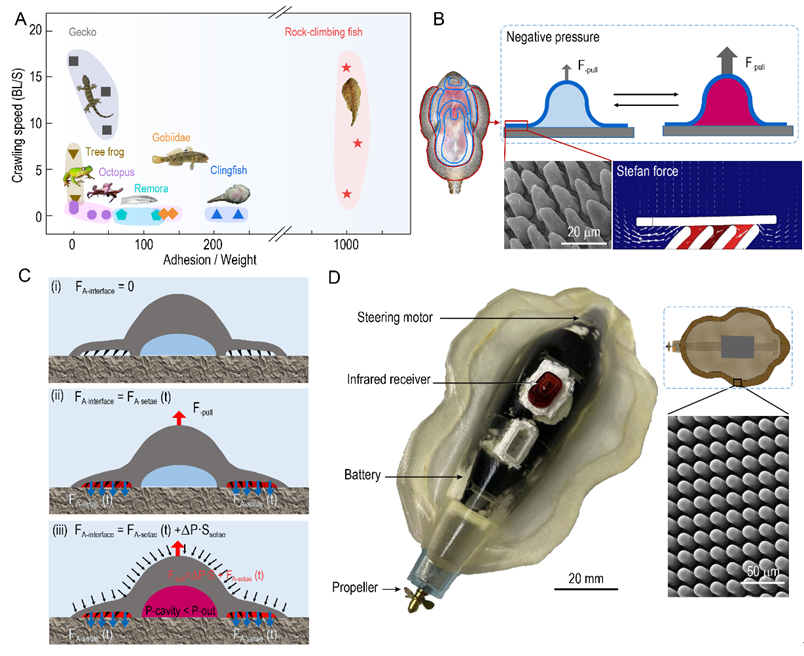
Underwater "traffic" encompasses a fascinating variety of creatures, from fish with their graceful swimming postures to jet-propelled jellyfish and remoras hitching rides on other organisms. Among these, a remarkable species known as the "underwater gecko", the Rock-climbing fish (Beaufortia kweichowensis), stands out. This extraordinary creature possesses a unique set of abilities – it can swiftly glide along underwater surfaces like an ice skater, crawl against water currents, and securely adhere to a fixed position with remarkable adhesion force.
Recently, a collaborative effort between the research team at Shenyang Institute of Automation (SIA), Chinese Academy of Sciences (CAS), and institutions including the Chengdu Institute of Biology, Chinese Medical University, Tsinghua University, and the University of Hong Kong, has shed light on the closely guarded secrets behind the rock-climbing fish’s dynamic adhesion and rapid crawling movements.
The team has also designed a Climbot, which is an underwater biomimetic adhering-sliding robot inspired by the rock-climbing fish. The research team highlighted that the Climbot's impressive adhesion ability enables it to cling with a force equivalent to 1000 times its weight while accomplishing a remarkable glide at a speed of 7.83 times its body length per second. Thestudyhas recenlty been published on the latest issue of National Science Review (NSR).
The secret to the rock-climbing fish's exceptional adhesion-gliding prowess lies in the setae structures present on the edges of its suction cups. These setae, measuring 4-6 micrometers in diameter and 12-14 micrometers in length, convert the contact area with water into a "sticky" gel-like substance under the influence of Stefan force, firmly attaching the suction cups to the surface and creating a dynamic water seal. This unique suction cup can passively deform its soft abdomen to counteract external detachment forces, or actively contract its abdomen to generate a powerful adhesion force, anchoring itself securely to a particular position. Moreover, the water film present at the contact interface acts as a "lubrication film" during movement, reducing frictional resistance and facilitating smooth surface gliding. This ingenious mechanism effectively balances the conflict between substantial adhesion and rapid gliding.
Drawing inspiration from this discovery, the research team successfully utilized micro-nano lithography and molding techniques to fabricate setae arrays, integrating them into 3D-printed soft suction cups, and incorporating a control unit to design and create the Climbot, an underwater adhering-sliding robot. The Climbot can tightly adhere to the surface of a moving ship model and glide effortlessly underwater.
This research showcases a novel underwater locomotion, and the potential applications of Climbot underwater suction-crawling robot technology hold promising prospects in the fields of marine science, scientific exploration, marine pollution monitoring,etc.