Since most autonomous underwater vehicles must carry their own energy when working under water, variable methods are usually adopted to improve endurance, such as low-power electronic equipment, efficient propulsion method and low resistance shape design, etc.
Recently, a research team from Center of Marine Information Technology and Engineering at Shenyang Institute of automation (SIA), Chinese Academy of Sciences (CAS) put forward a method to improve the endurance of autonomous underwater vehicles. By using porous media as the surface layer of pressure shell and reducing the drag, autonomous underwater vehicle can "swim" further without changing its shape and battery capacity. The study was published inOcean Engineering.
Under the study, researchers conducted research on the mechanical characteristics and drag reduction mechanism of autonomous underwater vehicles using porous material, and performed preliminary comparative tests.
Using Renus100AUV and SUBOFF as the research object, researchers carried out simulation and comparison tests under multiple conditions. The results show that the thickness of porous media material and porous viscosity coefficient are closely related to the drag of autonomous underwater vehicles.
The drag increases with the increase of the porous viscosity coefficient and thickness of the porous material. Take the example of REMUS100AUV sailing at 1.54m/s, when the porous viscosity coefficient is approximately 830kg/m3s, the drag of REMUS100 is relatively close to the test value. When the porous viscosity coefficient is less than 830kg/m3s, the drag will be smaller than the test value. And the drag of Remus100AUV decreases with the decrease of the porous viscosity coefficient.
Simulation and experimental results show that porous material can change the surface fluid characteristics of autonomous underwater vehicle, and under certain conditions, porous materials attached to the surface of the underwater vehicle can indeed reduce autonomous underwater vehicles’ drag, so that it can further improve its own endurance under the same conditions.
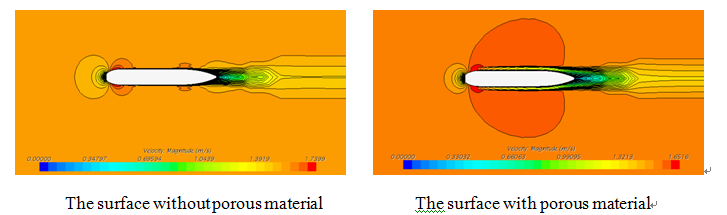
The velocity gradient contours of fluid near the autonomous underwater vehicle
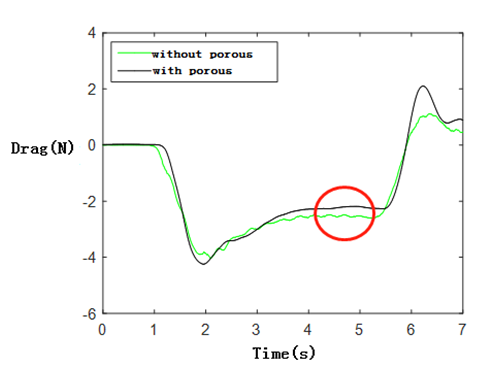
The red circle indicates the comparison of the drag of autonomous underwater vehicles with or without porous material
Contact:
DAI Tianjiao
Email: daitianjiao@sia.cn