Recently, a research team led by LIU Lianqing and JIAO Niandong at Shenyang Institute of Automation Chinese Academy of Sciences has proposed a new method to operate and assemble microstructures using bubble microrobots. The study was published in Small (IF 10.856), a worldly known scientific journal covering micro and nano technology.
The combination of engineering technology and life science has become one of the hotspots leading the frontier of technological innovation. Hydrogel microstructures that encapsulate cells can be assembled into tissues and have broad applications in biology and medicine. However, the manipulation and assembly of microstructures, especially the 3D posture control of a single microstructure remains a challenge. In order to solve this problem, bubbles in the liquid environment were used as microrobots to perform 3D operation and assembly of microstructures.
Bubbles have been employed in the field of micromanipulation to attract, capture, and carry micro-objects. The research team proposed a novel 3D manipulation and assembly technique based on optothermally generated bubble microrobot. The generation, rate of growth, and motion of optothermally generated surface microbubbles can be controlled by modulating the laser focused on the interface between the substrate and fluid. Micromodules of different shapes and sizes can be manipulated by the mobile bubble microrobot in various ways, including 2D movement and rotation, and 3D rotation and rolling. In the 3D rotation process, when the bubble was generated just under the microstructure, the liquid flow was blocked and then the microstructure could be lifted. A variety of hydrogel microstructures of different sizes and shapes can be operated and assembled in both 2D and 3D conformations by bubble microrobots.
The proposed method is promising for the fabrication of more complex 3D tissues which can be useful for tissue transplantation, regenerative medicine, and biological research.
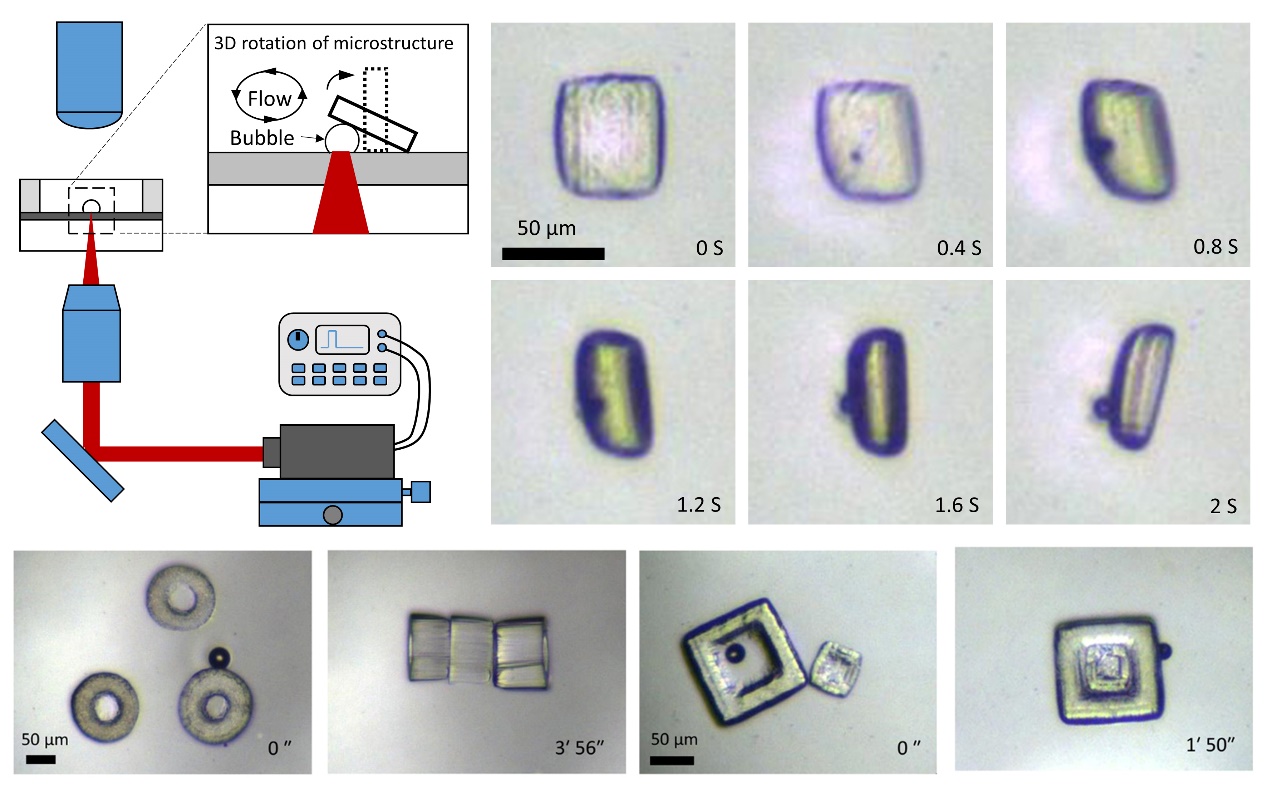
Manipulation and assembly based on the bubble microrobot. (Photo by JIAO Niandong)
Contact:
JIAO Niandong
Email: ndjiao@sia.cn