For patient with physical disability, rehabilitation robots can help them restore or augment limbs function, and someday may replace physiotherapist. For the study of rehabilitation robot, human motion intention recognition based on surface electromyography (sEMG) has been regarded as an outstanding way to realize the intuitive and multifunctional control of prosthesis and rehabilitation hands.
Recently, ZHAO Xingang and his research team at Shenyang Institute of Automation have proposed an adaptive hybrid classifier for sEMG recognition under non-ideal conditions, such as the outlier motion, muscle fatigue, and electrode shifts, which was published on IEEE Transactions on Neural Systems and Rehabilitation Engineering.
Under this study, researchers have achieved recognition accuracy of 92 percent for ten common gestures, which is significantly higher than that of previous studies. This study is expected to promote the clinical applications of sEMG-based prosthesis and rehabilitation hands, which are becoming more important and helpful for the disabled.
However, researchers find that there is a big gap between academic research and clinical application. One key factor is the experimental conditions for sEMG-based recognition in the laboratory are too simple and without daily interferences. To solve this problem, the research team proposed an adaptive hybrid classifier to deal with various interference problems in clinical applications, such as new movements, muscle fatigue and electrode migration.
First, an adaptive incremental hybrid classifier (AIHC) is constructed by combining one-class LDA in conjunction with two update schemes. The AIHC can reject outlier classes; then, its recognition ability can incremental grow online by considering the rejected class as a new target class. Second, an online evaluation factor is designed to help AIHC self-update for adapting to the changes in sEMG characteristics. Third, an AIHC-based recognition strategy is developed to reduce the influences of multiple interferences caused by outlier motion, muscle fatigue, and electrode shifts. The obtained recognition results indicate that the AIHC can accommodate a large-scale deviation in sEMG characteristics and has significant advantages compared to previous studies.
This research was supported by the Natural Science Foundation of China and the State Key Laboratory of Robotics.
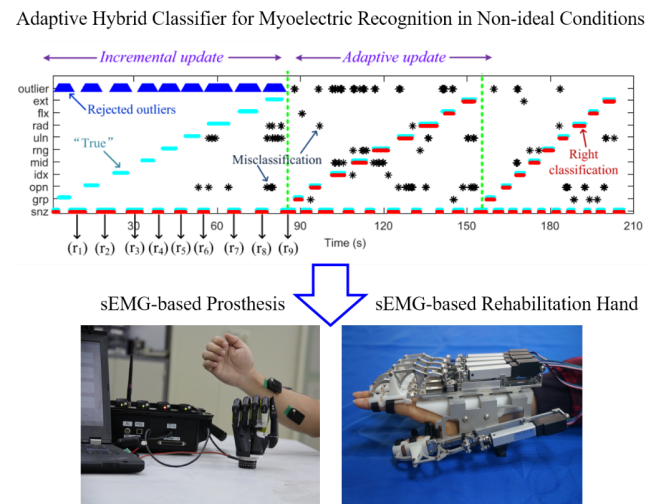
Adaptive hybrid classifier for myoelectric recognition in non-ideal conditions (Image by ZHAO Xingang)