Recently, the micro and nano robotics research team of Shenyang Institute of Automation, the Chinese Academy of Sciences (SIACAS) developed a dynamic model to characterize contractile behaviors and mechanical properties of a cardiomyocyte.
The results were published in Biophysical Journal entitled “Dynamic Model for Characterizing Contractile Behaviors and Mechanical Properties of a Cardiomyocyte”.
Bio-syncretic robotic is the emerging field of robotic development in the last decade, and is expected to resolve and overcome the challenges of the robotics development, such as the low energy efficiency, low inherent safety, low control degree of freedom, insufficient flexibility and so on. In recent years, the research on bio-syncretic robots has made some great achievements, which mainly focus on the movement realization of the cells-actuated micro structures. The current control methods mainly focus on the simple change of movement speed and direction. Due to the lack of the theoretical model of biological actuators, the bio-syncretic robots are faced with the key problems and technical challenges about the movement control and dynamic analysis.
Looking at this, the research team developed a linear dynamic model of a single cardiomyocyte cell at the subcellular scale to characterize the contractile behaviors of heart cells.The mechanical dynamics model of a single cardiomyocyte is completed by modeling the subcellular structures by the corresponding mechanical and electronic components, such as springs, dampers and motors.
To verify the proposed model, the researchers used Scanning Ion Conductance Microscopy (SICM) to measure the beating pattern of a living cell. According to the beating data, the system parameters can be identified based on the theoretical model, to describe the physical electromechanical characteristics of the subcellular structures of a single cardiomyocyte, such as the mass, viscosity, elasticity and action potential.
Taking advantage of the non-contact measurement mode of SICM and the living cells based dynamic model, the multiple lossless electromechanical characteristics (mass, viscosity, elasticity and action potential) of subcellular structures can be obtained in situ.
This work may lay the foundation for research on the dynamic optimization and control technology of bio-syncretic robots based on the biology.
This work was supported by the National Natural Science Foundation of China, Chinese Academy of Sciences, and State Key Laboratory of Robotics.
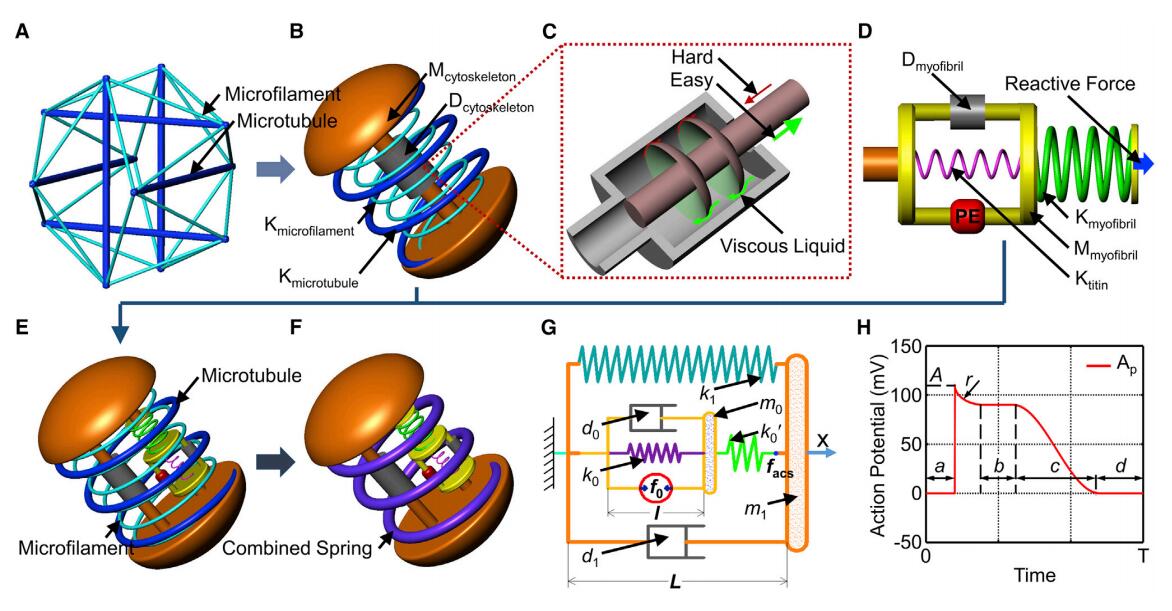
Figure: Mechanical model of the cytoskeleton and the active contractile structure of a cardiomyocyte . (Image by SIACAS)
Contact:
Prof. LIU Lianqing
Shenyang Institute of Automation, Chiese Academy of Sciences
E-mail: lqliu@sia.cn