The article focuses on the friction stir welding (FSW) robot and introduces the system structure of it as well as five kinds of typical welding conditions. Through establishing the six dimensional stiffness model of guide screw's joint and presenting a numerical simulation method of flexible joint, this paper improves the accuracy of the engine's finite element model, and then analysis the effect of the different kinds of joint's simulation on the whole machine's stiffness. Based on the simulation analysis of the friction stir welding robot under the no-load and load two working-conditions, the stiffness and strength data of the whole machine is worked out, so that laying a good foundation at the beginning of the structure design of the whole robot. Especially for the worst working-condition of the load, melon petal welding condition, its simulation analysis result provides us with an effective way for comprehensive evaluation of welding precision and welding performance by robot.
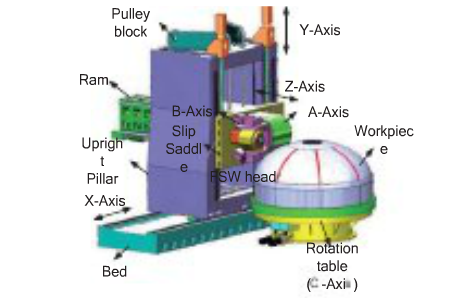
Friction stir welding robot (FSWR)
Luo HT,Fu J,Yu M,et al. Static simulation analysis on friction stir welding (FSW) robot[C]. 见:6th Annual IEEE International Conference on Cyber Technology in Automation, Control and Intelligent Systems, IEEE-CYBER 2016. Chengdu, China. June 19-22, 2016.