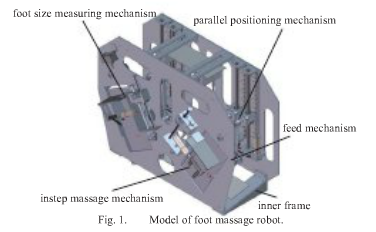
Appropriate massage on the acupuncture points based on Chinese massage therapy is beneficial to the treatment for hypertension. This paper presents a foot massage robot which reproduces the expert techniques of Chinese massage. The robot is mainly consisted of a parallel positioning mechanism which locates the acupuncture points, and a feed mechanism as the end-effector to apply the massage force to the acupuncture points. The kinematics is analyzed and the transformation matrix is given. The massage process and the desired trajectory are briefly introduced. The trajectory planning algorithm is given after analyzing the point to point trajectory and the multipoint trajectory. Simulation results show the trajectory planning algorithm is effective.
This work was published in article titled Trajectory planning for a foot massage robot based on Chinese massage therapy at the 6th Annual IEEE International Conference on Cyber Technology in Automation, Control and Intelligent Systems, IEEE-CYBER 2016. Chengdu, China. June 19-22, 2016.by Wang L,Wang HG,Ma DH,et al.