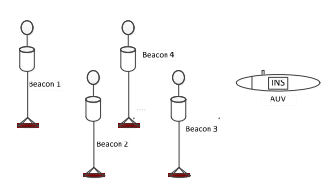
The integrated navigation system for the deep water vehicles (Image from the paper)
A novel integrated navigation algorithm, multi-model EKF (Extended Kalman Filter) integrated navigation algorithm, is presented in this paper for the deep water autonomous underwater vehicle. When a deep water vehicle is performing tasks in the deep sea, the navigation error will accumulate over time, if it relies solely on its own inertial navigation system. In order to get a more accurate position for the deep water vehicle online, an integrated navigation system is constructed by adding the acoustic navigation system. And because it is difficult to establish the kinematic model and the measurement model accurately for the deep water vehicle in the underwater environment, we propose the Multi-model EKF integrated navigation algorithm, and estimate the measurement errors of beacons online. Then we can estimate the position of the deep water vehicle more accurately. The new algorithm has been tested by both analyses and field experiment data (the lake and sea trial data), and results show that the multi-model EKF integrated navigation algorithm proposed in this paper significantly improves the navigation accuracy for the deep water vehicle.
This work was published on INTERNATIONAL JOURNAL OF ADVANCED ROBOTIC SYSTEMS,2016,13:1-15.titled A Multi-model EKF Integrated Navigation Algorithm for Deep Water AUV.