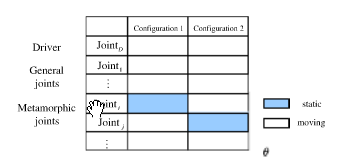
The cyclogram of a 2DOF metamorphic mechanism (image from the original paper)
One of the key works in applied metamorphic mechanism design is to obtain the source metamorphic mechanism and the constraint forms and structures of metamorphic joints to carry out given working tasks. The metamorphic cyclogram and the types and combinations of the constraint metamorphic joints for the tasks are presented according to the task-based kinematic rules. The augmented Assur groups are further classified based on the output movement combinations so that the corresponding relationships between the task-based kinematic requirements and the structures of the augmented Assur groups are established, thereby providing a simple way to the synthesis of topological structures of source metamorphic mechanisms based on the augmented Assur groups. The equivalent resistance matrix of the metamorphic joints is introduced from the metamorphic cyclogram and equivalent resistance gradient of the metamorphic joints. The constraint structure matrix is then obtained using the resistance matrix and the constraint forms and structures of the metamorphic joints. The synthesis method of metamorphic mechanisms with the constraint forms and structures of metamorphic joints is described in steps. The task-based design approaches are demonstrated for a reposition metamorphic mechanism for broken strands of the repair robot used in extra-high-voltage power transmission lines. The results show that proposed design theory and method are feasible and practical.
This research was published on Mechanism and Machine Theory,2016,96:334-345.titled Task-based structure synthesis of source metamorphic mechanisms and constrained forms of metamorphic joints. (Li SJ,Wang HG,Meng QL,et al.)