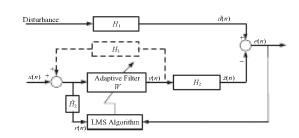
Scheme of the FXLMS control algorithum (Image from the original paper)
Recently, researchers from Shenyang Institute of Automation investigate the adaptive filtered-U least mean square feed-forward algorithm for active resonant vibration control of a clamped-clamped flexible piezoelectric plate structure under persistent harmonic excitation. Different from the widely used filtered-X least mean square algorithm based on the finite impulse response filter, the filtered-U least mean square algorithm uses the infinite impulse response filter. An infinite impulse response filter can be constituted simply by using two adaptive transversal filters. The filtered-U least mean square algorithm can model the system accurately with much fewer coefficients. Moreover, the filtered-U least mean square algorithm has better control performance and stability in the presence of vibration control feedback, owing to the inherent zero-pole structure of the infinite impulse response filter. In this investigation, the filtered-U least mean square algorithm is implemented only in experiments. Two experimental cases are carried out, including the reference signal extracted from the function signal generator and the lead zirconate titanate sensor. A proportional-derivative feedback control algorithm is also applied as a comparison. The experimental results demonstrate the feasibility and performance of the designed proportional-derivative controller and filtered-U least mean square controller.
The result was published on Journal of Intelligent Material Systems and Structures, 2016 Vol.27(2) 166-194.