Flocking behaviours exist widely in nature in the form of the flocking of birds, the schooling of fish and the swarming of bacteria. Motivated by observations of these flocking behaviours in their environments, multi-robot systems are expected to be applied in a wide set of situations, such as exploration, search-and-rescu, and so on. Recently, the flocking of multi-robot systems has attracted much attention. As the size and complexity of multi-robot systems rapidly increase, the fault detection and isolation (FDI) method in flocking is becoming more and more important.
There exist many works on the design of FDI schemes. Some of these works concentrate on FDI schemes with a centralized control structure. However, it is not wise to solve the FDI problem with a centralized structure due to the limitations of the communication and computation capabilities of FDI units and robots. To tackle these problems, we focus on developing a distributed FDI scheme for the flocking of multi-robot systems.
Recently, researchers from Shenyang Institute of Automation have conducted a study on distributed FDI scheme for flocking in a multi-robot system with imperfect communication. In this study, we design a detection method that consists of the local-information-exchange-based detection technology and the sensor-measurement-based detection technology to cover both cases of perfect and imperfect communication, respectively. By considering a situation in which fault robots still influence the behaviours of other robots, a fault isolation solution for fault robots is proposed. Figure 1 shows how a robot isolates the dangerous zone of a faulty robot.

Figure 1. Faulty robot isolation. (Image provided by SHAO Shiliang et al.)
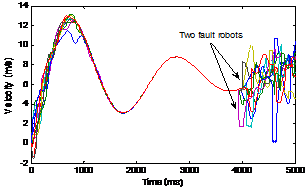
Figure 2. Velocities of the robots without FDI . (Image provided by SHAO Shiliang et al.)
Figure 2 demonstrates a scenario where two faulty robots occur at time 3750ms in the multi-robot system that has formed the flocking. Each curve in this figure shows the velocity of the robot with time. We can observe that the velocities of all the robots are not identical anymore after 4000ms. The reason is that the faulty robots that are not isolated have a bad influence on the behaviours of the other robots in the system.
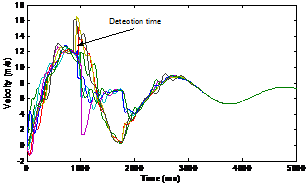
Figure 3. Velocities of the robots with FDI . (Image provided by SHAO Shiliang et al.)
Figure 3 demonstrates the velocities of the robots when the faulty robots are detected and isolated by the proposed FDI scheme. It indicates that the proposed FDI scheme, which isolates the faulty robots, is effective. It is necessary to avoid faulty robots instead of just ignoring them as in the conventional isolation schemes.
This work was published on the journal of International Journal of Advanced Robotic Systems, Volume. 11(1), 2014.
CONTACT:
Shiliang Shao
Shenyang Institute of Automation, Chinese Academy of Sciences
E-mail: shaoshiliang@sia.cn