Underwater Gliders are a class of underwater vehicles without external active propulsion systems. Commercially available gliders are capable of long range missions with low energy consumption, low cost, and long endurance, which have found broad applications in physical and biological oceanography.
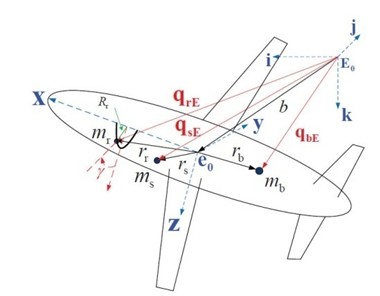
Fig.1 A 3D illustration of Seawing glider (Image provided by ZHANG Shaowei, et.al)
Researchers from Shenyang Institute of Automation (SIA), Chinese Academy of Sciences designed a SeaWing glider steered by rotation of inner mass block, shown in Fig.1. By changing its buoyancy using an internal pumping system, the glider moves up and down in a water column with a sawtooth motion. Other than the sawtooth motion, the glider can perform another steady state motion whose underwater trajectory is a spiral, shown in Fig.2.
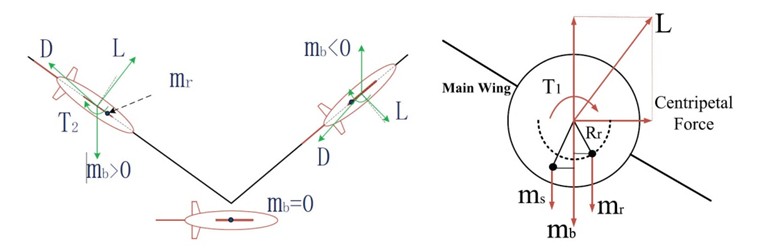
a)Generate linear sawtooth motion b) Generate turning spiraling motion
Fig. 2 Mechanisms for the linear sawtooth motion and the spiraling motion (Image provided by ZHANG Shaowei, et.al)
The researchers established the dynamic model with Lagrange equation as follows:

From the dynamic model of the glider, the researchers find that it is similar to the underwater vehicles dynamic model, while the difference is that the underwater vehicle utilizes the rudder, thruster to suppress the hydrodynamic, the glider selects the lift force as the driven force. So the hydrodynamic analysis is quite important for the glider dynamic system, the reseachers compute the hydrodynamic coefficient of the glider with different posture as Fig.3
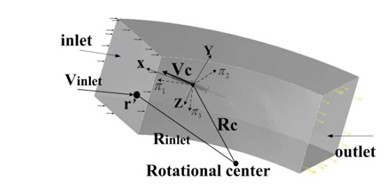
Fig. 3D turning of the CFX computing (Image provided by ZHANG Shaowei, et.al)
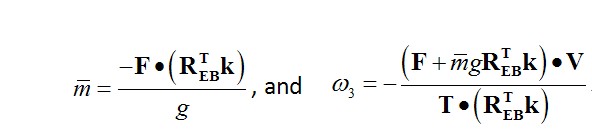
Even though spiraling motions have been observed in most glider systems, its underlying mechanism is much less understood than the linearly sawtooth motion, for the complex dynamic model and the coupled hydrodynamic effects. The researchers select a method to simplify the dynamic model and found that the velocity depends on the net buoyancy:
Which also illustrate in Fig.4, gliding in 2D and 3D mode has the same property.
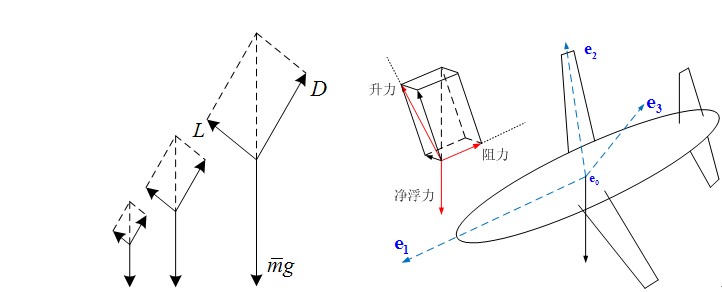
Fig.4 Lift and drag force with respect to net buoyancy (Image provided by ZHANG Shaowei, et.al)
The glider has successfully accomplished a series of tests in the ocean in 2011. The glider reached the maximum gliding depth approximately 800m before it became neutrally buoyant, and then ascended to the surface by adjusting the buoyancy. The press and salty generate a increment with the opposite direction of gravity. With the increasing of the depth, becomes bigger, when it cancels the nominal setting net buoyancy in the diving down cycle, the glider can not driving, while the influence becomes small as it dive up. This property changes the average velocity of the diving down and up, and for the switching from diving down to up, the nominal setting net buoyancy change its direction, which generate the biggest velocity, which shows in Fig.5 and Fig.6.
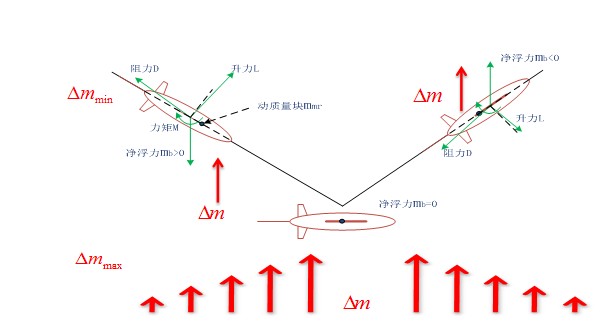
Fig.5 lift and drag force with respect to net buoyancy (Image provided by ZHANG Shaowei, et.al)
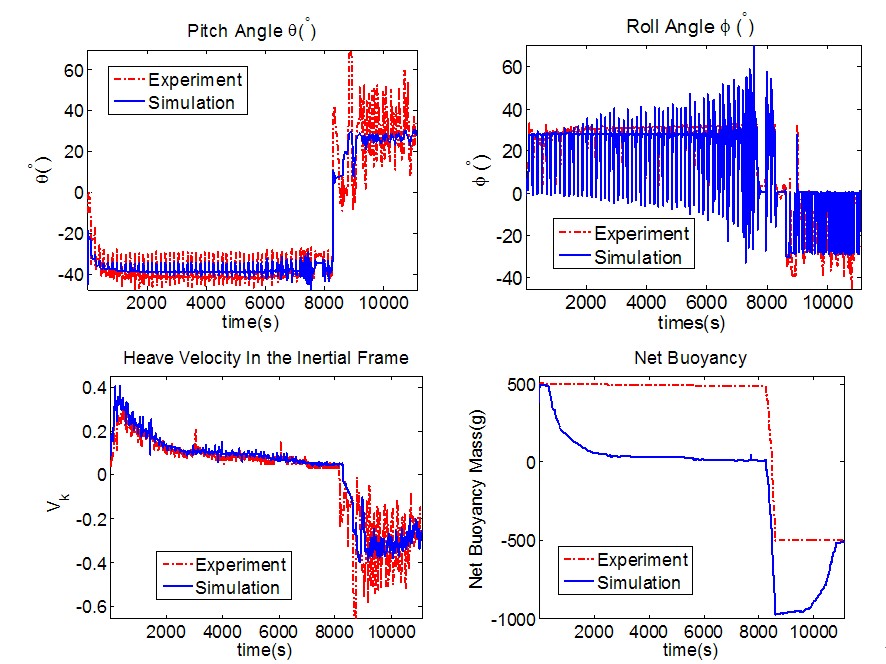
Fig.6 Comparing experimental results with simulation results (Image provided by ZHANG Shaowei, et.al)
This work was published on the journal of Ocean Engineering, Volume 60, 1 March 2013, 1-13. It was supported by the State Key Laboratory of Robotics, Grant no. 2009-Z05, and Knowledge Innovation Program of Chinese Academy of Scineces, Grant no. KZCX2-YW-JS205.
CONTACT:
Shaowei Zhang
Shenyang Institute of Automation, the Chinese Academy of Sciences
Email:zswsia@126.com