Over the last decade there has been interest in developing bio-inspired strategies for chemical plume tracing (CPT) in natural environments. However, most of the existing studies have mainly focused on the plume tracing issue and validated their algorithms in a small operation area or in a simulated environment; they lacked detailed reports of CPT experiments in natural environments on a large scale. The tracking of a chemical plume in natural environments, such as near-shore oceanic conditions, where the plume is developed under the influence of turbulence, tides and waves, challengesCPT algorithms on how to cope with the intermittency of filaments, significant plume meander, and the lack of correlation between the fluid flow direction and the plume long axis.
Researchers from Shenyang Institute of Automation (SIA), Chinese Academy of Sciences proposed a subsumption architecture for CPT missions in near-shore ocean environments on a large scale, consisting of four fundamental behaviors: finding the plume, maintaining the plume, reacquiring the plume, and declaring (or identifying) the source location, as shown in Fig. 1. The maintaining and reacquiring behaviors are inspired by male moths flying upwind along a pheromone plume to locate a sexually receptive female. The proposed moth-inspired CPT strategy was implemented on a REMUS autonomous underwater vehicle (AUV) developed by the Woods Hole Oceanographic Institute and tested in November and April 2002 at the San Clemente Island of California and in June 2003 in Duck, North Carolina. The field experiments successfully demonstrated tracking of chemical plumes over 100 meters and source declaration accuracy relative to the nominal source location on the order of tens of meters in the near shore, oceanic fluid flow environments.
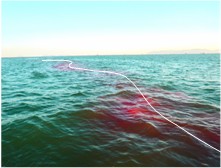
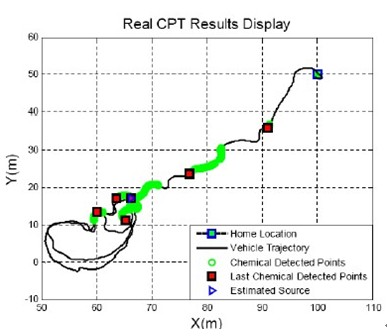
Researchers from SIA conducted further in-water tests on bio-inspired CPT missions in Dalian Bay, China in October 2010. Different from the tests in San Clemente Island and Duke, for the in-water tests in Dalian Bay, a Rhodamine dye plume was developed by pumping Rhodamine dye to the sea surface thus the plume could be visible and a better understanding of the plume nature of meander could be obtained (Fig. 2 (a) shows a snapshot of a developed plume). In order to perform the tests, SIA developed an AUV equipped with multiple sensors as shown in Fig. 2(b), including a Cyclops-7 underwater fluorometer to detect the Rhodamine and a workhorse navigator 1200K Doppler velocity log to measure the flow speed and direction. The field tests address two types of missions, the moth-inspired maneuvers to trace a plume at a long distance and the source declaration maneuvers to identify the plume source. The successful experiments in the tidally dominated ocean environments with turbulence and waves demonstrated the chemical plume tracing over 100 meters with the moth-inspired strategy and the accurate source declaration via a proposed source identification algorithm SIZ_F derived from the moth-inspired plume maintaining and reacquiring behaviors (Fig. 2(c) shows an experimental result).
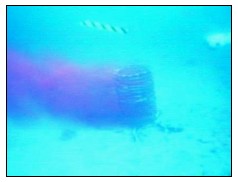
For further operations to deal with the declared plume source, the source needs to be automatically or interactively confirmed or inspected using a visual system. Images taken in near shore ocean environments are very vague and colors in the images are not well-defined since the propagation of light underwater is affected by scattering, refraction, and absorption. Most of the existing techniques provide crisp segmentation of images, where each pixel is classified into a unique subset. This classification may not be effective for extracting a Rhodamine dye plume and its source in underwater conditions because colors in the images taken in near shore ocean environments are not well-defined.
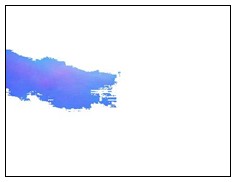
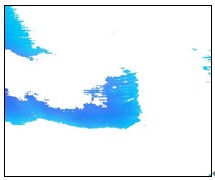
In order to deal with uncertainty, a fuzzy logic based iterative algorithm is proposed to segment color components of the Rhodamine dye plume and its source. The algorithm literately generates color patterns based on a defined reference color and extracts color components of the chemical plume and its source from fuzzy images using a fuzzy color extractor. The effectiveness of the algorithm is demonstrated by the segmentation result of the images taken via a video camera during the in-water tests of 2002. Fig. 3 shows a result of the extraction of the Rhodamine dye plume and its source.
The proposed plume source identification and source verification algorithms are embedded in the CPT subsumption architecture as shown in Fig. 1. The complete CPT strategy would be valuable for AUV applications such as searching for deep sea hydrothermal vents, finding unexploded ordnance in near-shore oceanic environments, and monitoring pollutants or localizing sources of hazardous chemicals in a harbor.
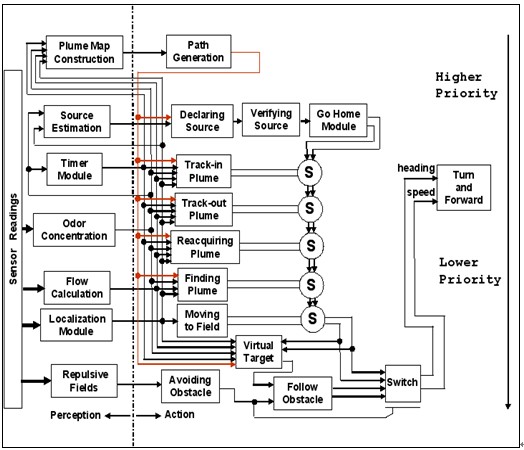
Figure 1. Subsumption architecture for chemical plume tracing and source localization. (Image provided by Prof. LI Wei, et.al)

(a) (b)
(c)
Figure 2. (a)A Rhodamine dye plume generated for the field experiments conducted in Dalian Bay, China in October 2010. The release rate of Rhodamine dye is 1–2 g/min, and the white curve depicts the plume centerline; (b) The AUV employed in the field experiments in Dalian Bay, which is developed by Shenyang Institute of Automation, Chinese Academy of Sciences. (c) In the mission MSN171639 of the experiments, the AUV tracked the plume from the home location over 60 meters to the source location and identified the source using the SIZ_F algorithm. (Image provided by Prof. LI Wei et.al)
(a) (b) (c)
Figure 3.A result of the extraction of the Rhodamine dye plume and its source. (a) Original image; (b) Extracted plume colors; (c) Extracted source colors.(Image provided by LI Wei et.al)
This work was published on the journal of Sensors, Volume 13, March 2013, 3776-3798. It was partly supported by the National Natural Science Foundation under grants 61075085 and 41106085, and Program of the State Key Laboratory of Robotics at Shenyang Institute of Automation under grant 2009-Z03.
CONTACT:
Prof. LI Wei
Shenyang Institute of Automation, Chinese Academy of Sciences
Email: wli@csub.edu