The latest progress in the research on the application of nano manipulation robot in lymphoma cells conducted by the micro nano project team of Shenyang Institute of Automation (SIA), the Chinese Academy of Sciences (CAS) was published in the latest issue of Alta Physico-Chimica Sinica, a SCI international retrieval periodical, and a diagram of the research was shown on the front cover.
The paper is titled Drug-Induced Changes of Topography and Elasticity in Living B Lymphoma Cells Based on Atomic Force Microscopy Study. The cover of this issue displays the diagram of trapping an individual living cell by using MEMS-fabricated pillar arrays for robotized detection.
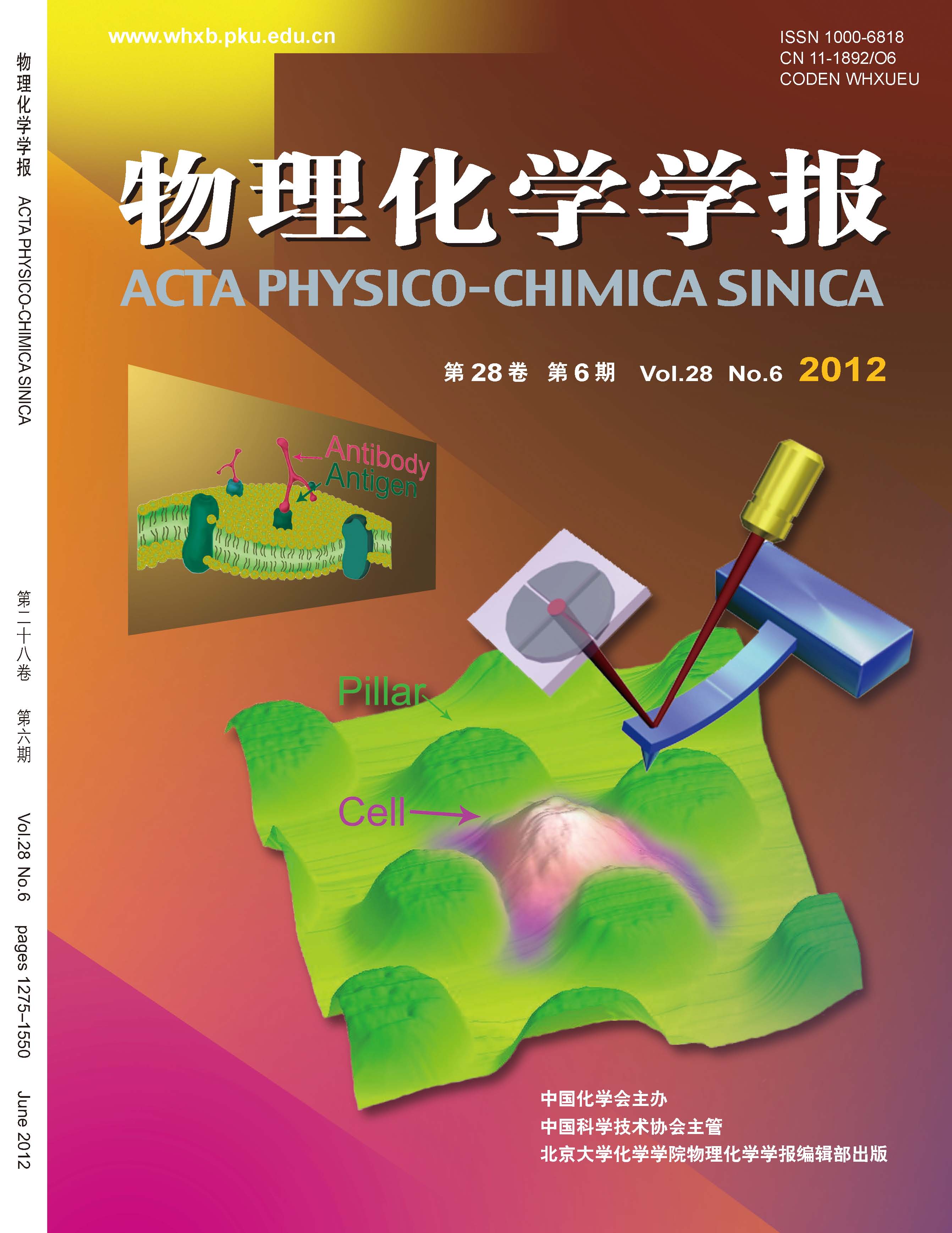
The cover of this issue displays the diagram of trapping an individual living cell by using MEMS-fabricated pillar arrays for robotized detection.
Currently, most atomic force microscopy (AFM) researches about living cells are performed on microbial cells and mammalian adherent cells, which can be immobilized stably to the substrate due to their own characteristics. Owning to the lack of adequate cellular immobilization methods, AFM imaging of living, suspended mammalian cells is still a big challenge. In this paper, researchers present a mechanical trapping method based on combining MEMS pillar arrays and electrostatic adsorption with poly-L-lysine. Through the pillar arrays coated with poly-L-lysine, the immobilization of individual living B lymphoma cells and the high-resolution imaging of the ultra structures on the cell surface can be realized. In this way, the topography and elasticity changes of individual B lymphoma cells that were stimulated with different concentrations of Rituximab were observed and measured dynamically. It is shown that, the cells become more corrugated and softer under the simulation of Rituximab, and the change ranges of topography and elasticity are higher when the concentration of Rituximab is higher. These results thus provide a unique insight into the effects of Rituximab on individual cells.
As a new branch of robotics, nano manipulation robot technology is designed to perform some tasks under extreme circumstances that can not be accomplished by human beings, such as atomic accuracy positioning and molecular force measuring, etc. The application of nano manipulation robot in the mechanism study of difference in lymphoma targeted therapy can enhance the capability of human beings and realize in situ detection and manipulation on the surface of cells.
Since the year 2009, the team has been engaged in the researches on in situ cellular detection methods at the single-cell and single-molecule levels using nano manipulation robot. Related achievements have been adopted by or published in some world-known periodicals and international conferences such as Biochemical and Biophysical Research Communications, Scanning, SCIENCE CHINA Life Sciences, IEEE-NANO and IEEE-NANOMED, etc. The research team has gained significant support from the National Natural Science Foundation of China, CAS and the State Key Laboratory of Robotics in SIA. (Dai Tianjiao)